
Dynamic modeling expertise enables controls development
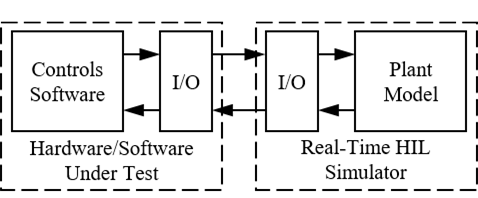
One of Czero's core competencies is developing dynamic models of physical hardware which can be used to support controls development. This is known as HIL (hardware-in-the-loop), (model-in-the-loop) & SIL (software-in-the-loop) modeling. At the core of HIL/MIL/SIL methodology are dynamic plant models which simulate the physics of the emulated hardware. When the plant model is deployed on a HIL simulator, the controller acts as if it is controlling real hardware, when in fact it is connected to a simulator. Often the principal challenge in developing plant models for HIL systems is that they must run in real-time and have constraints including accurate representation of the plant physics, controller rates and HIL hardware computational power.
Benefits of HIL/MIL/SIL modeling
There are many significant advantages to utilizing HIL/MIL/SIL methodology as part of a controls system development program:
- Reduce technical, schedule, and budgetary risks.
- Parallel development of system hardware and controls reduces the overall timeline and cost.
- Tuning, and validating the controls system before connecting it to the hardware reduces the risks by identifying potential issues early on that could delay the schedule or damage the physical hardware.
HIL/MIL/SIL methodology offers many other benefits in the controller development process as well by providing the team with opportunities that would not be possible if developing the controller with physical hardware:
- Explore system response outside of the normal safe operating envelope.
- Determine control system’s response to disturbances and sensor faults.
- Detect potential failure modes.
- Develop and validate new control strategies/algorithms.

Custom approaches for different platforms
Czero has experience using many different HIL platforms including Speedgoat, dSPACE, ETAS LABCAR and NI. Our engineers will customize the solution based on the hardware being used. Higher computational power allows for more accurate plant models to be implemented. This can involve faster CPU/GPUs and/or implementing parallel processing on the hardware.
Custom block sets for complex systems
The goals of the HIL system determine the type and level of fidelity of the plant model. For systems that demand more predictive plant models, Czero has developed custom physics-based block sets in MATLAB/Simulink that can run in real-time and model gas, liquid and two-phase flow; chemical reactions; heat transfer; linear and rotational motion of masses and magnetic and electrical responses. By utilizing physics-based models, the HIL system can predict plant performance and transient response over a much broader range than would otherwise be available using strictly test data.
Example application - Abrams Gas Turbine and Powertrain
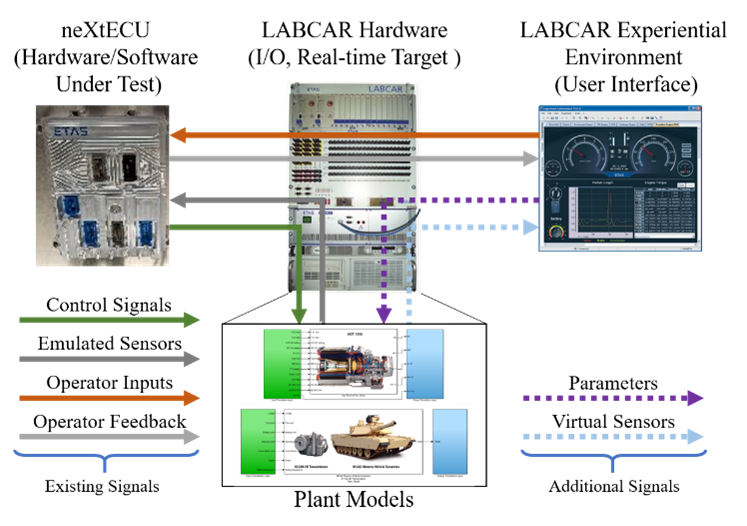
One example of this is Czero developed and validated a high-fidelity physics-based model of the Abrams gas turbine and powertrain to support the Real Time Control Systems (RTCS) group within the US Army’s Ground Vehicle Systems Center (GVSC) in validating a new controller (hardware/software) for the Abram’s gas turbine. This HIL model was developed in MATLAB/Simulink and was deployed on multiple ETAS LABCAR test benches and used support controller (ECU) development and validation before moving to on-engine testing. The models are fully predictive and physics-based.
To model the Abram’s multi-spool gas turbine with sufficient accuracy to be effective in developing and validating the gas turbine control system required creating a high fidelity physics-based transient model. The model included compressible flow dynamics, real gas properties from NIST REFPROP (as ideal gas approximations are insufficient over the turbine’s operating range), rotational dynamics, combustion, heat transfer, and thermal models among other elements. Though already relatively accurate due to the physics-based nature of the model, to further improve predictive accuracy the model was automatically calibrated on, and validated against, a large set up measurement data using an automated tuning methodology.
For the vehicle model a conventional straight-line vehicle dynamics model was insufficient to accurately capture the high torques associated with steering. Instead, a tracked vehicle dynamics model incorporating steering was implemented. The model included dynamic weight transfer and 4 discretized contacted patches underneath each of the 14 drive wheels (56 total contact patches). The resulting shear forces were integrated to determine both the vehicle’s motion, and the net sprocket torques. The transmission plant model was designed as a stand-alone system to provide a reactionary load for the gas turbine. As such the transmission model also incorporated a transmission controller to switch between gears and control the torque converter’s lockup clutch. The plant models were calibrated and validated using high-quality dynamometer data. The results demonstrated a high degree of correlation and provided confidence in the plant model's accuracy.
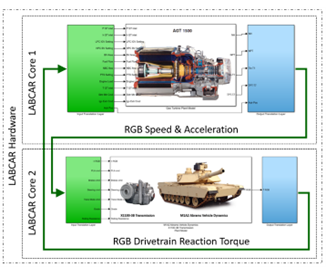

AGT1500 HIL Plant Model
Reach out to us, schedule a meeting, and let's find your custom solution.
We offer concept-to-prototype mechanical engineering R&D for developing systems and subsystems for cleantech innovations. Learn how we can help your team.